To see the Maze simulation running, click here for the movie. Warning: to be viewed properly, the player must be configured to a viewable area of 640x480 pixels or the video must be played full screen.
The aim of the project is to study the impact of using robot team in the
quality of the solution for many problems. The first application developed consists of
a simulator of a maze exploration by a
robot team. The maze contains a set of ordered control points, each one with an
associated task. At the start, the maze structure and the control points are
unknown. The robots cannot exit the maze before all the control point tasks have
been performed in the correct order. While the maze is explored, each robot
dynamically maps the maze structure with information provided by its sensors and
received from the other robots. Within each robot, a dynamic scheduler uses the
gathered information to update the robot goal. The maze structure is gradually
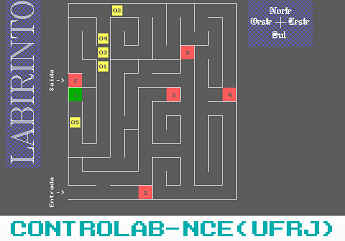
displayed on the screen as the maze exploration by the robots evolves. The
figure below shows a snapshot of the simulator's screen . The robots are the
yellow numbered squares, indicating the order they entered the maze. The control points
are represented by red numbered squares, which indicates their task
execution order. Each robot performs a depth-first maze search while the robot
team as a whole perform a breadth-first search. When a robot reaches a junction
and chooses a direction that leads it to a dead end, it broadcasts this
information in such a way that no other one that reaches the same junction will
take this path.
When a robot finds a control point which is not the one in turn to have it's
task performed, it continues the maze search. When the control point is due to
have it's task performed, the closest robot interrupts the maze search and goes
to it along the shortest known path. For that, each robot has its own dynamic
task scheduler, which permanently updates the robot goal. The robot goal may
change, for instance, if it is following the path leading to the control point
in turn and a shorter path is found by other robot during its maze mapping.
Others policies were also adopted
![]()